2.5. Фундаментальные и прикладные научные исследования в области механики,
систем управления и информатики
Тема УПРАВЛЕНИЕ Исследования в области динамики сложных механических
систем, проектирования орбит и построения математических моделей планирования космических
экспериментов
Гос. регистрация № 01.20.03 03442
Научный руководитель
д.т.н. Р.Р. Назиров
1. Исследование квантования
элитных и суперэлитных плазменных колец и изоморфизма
эволюционно зрелых колец и Боровских орбит электронов
в водородоподбных атомах. Анализ результатов
теоретических и экспериментальных исследований динамики тороидального
МГД-элемента и возможности его применения в контурах
стабилизации и ориентации вращающихся ИСЗ и КА нового поколения.
Проведен анализ целых и полуцелых квантовых
чисел в различных областях спектра элитных собственных значений безразмерной секториальной скорости плазменных колец, вращающихся в магнитогравитационном поле центрального тела. Рассмотрены «бозоноподобные»
и «фермионоподобные» резонансы. Исследованы границы
областей существования элитных колец и их эволюция в процессе исчезновения пондеромоторных сил. Установлен механизм образования щелей
между кольцами. Доказан изоморфизм эволюционно зрелых элитных колец и Боровских орбит электронов в атоме водорода.
Проведен анализ устойчивости КА с полостями,
частично заполненными жидкостью. Сформулированы задачи экспериментальных
исследований в обеспечение проверки
математической модели тороидального МГД-элемента как исполнительного элемента в задачах одноосной
ориентации вращающегося КА.
По
результатам работы сделан доклад на семинаре в ИКИ, представлен доклад на 5-ую Всероссийскую конференцию по
фундаментальным и прикладным проблемам современной механики в г. Томске,
опубликованы 5 статей в журнале «Космические исследования», 2 статьи в журнале
«Полет» и 1 препринт ИКИ.
г.н.с. д.ф.-м.н. Б.И. Рабинович, тел.
333-50-45
2. Разработка методов
управления и проектирование орбит перелета космических аппаратов с солнечным
парусом с изменяемой отражательной способностью применительно к задачам
межпланетных перелетов, включая перелеты к Меркурию, Венере и Марсу. Анализ
задач маневрирования с помощью паруса в окрестности точек либрации этих планет.
В качестве первой задачи рассматривалась разработка математического
обеспечения, необходимого для исследования возможностей построения орбит
аппаратов, снабженных солнечным парусом с управляемыми отражательными
характеристиками. Эта задача была решена созданием математической модели
движения аппарата под воздействием гравитационного поля планеты и ее
естественных спутников, около которой реализуется полет в окрестности
коллинеарной точки либрации, а также поля Солнца. Кроме того, моделировалось
воздействие давления солнечного света в зависимости от отражательных характеристик
паруса. В качестве параметров управления движением принимались углы
расположения паруса по отношению к Солнцу и коэффициент поглощения солнечного
света.
Разработанная модель позволила исследовать возможность выполнения
маневров с использованием солнечного паруса. Наиболее детально эти исследования
проводились для солнечно-земной точки либрации L1, т.е. точки, расположенной на линии Земля -
Солнце в 1.5 млн. км от Земли в сторону Солнца. В частности, были рассмотрены
варианты запуска в окрестность этой точки аппаратов с размерами паруса,
соответствующими отношению массы аппарата к площади в диапазоне от 0.022 до
0.07 кг/м² при номинальном зеркальном отражении.
Была подтверждена возможность снижения начальной амплитуды
орбиты в проекции на плоскость эклиптики от начальных 2-3 млн. км до более
удобных для мониторинга солнечного ветра значений в несколько сотен тысяч км.
Исследовались также способы построения группировок аппаратов в окрестности
точек либрации путем выполнения последовательных маневров за счет изменения
положения и отражательных характеристик паруса. Была подтверждена возможность
создания группировок, состоящих из аппаратов на орбитах, распложенных на разных
расстояниях от Земли, в зависимости от характеристик паруса.
В ходе работы по проекту были выявлены новые весьма перспективные в
плане практического применения задачи с использованием солнечного паруса с
управляемыми отражательными характеристиками. Эти задачи относятся к построению
группировок аппаратов и их управлению в экспериментах, связанных с
необходимостью синхронного получения измерений на аппаратах, движущихся в
группировках с относительным положением аппаратов, эквивалентным их жестким
связям, как в одной конструкции.
В настоящее время управление движением аппаратов, составляющих такие
группировки, предполагается выполнять с помощью специальных микродвигателей.
Идеальным местом для размещения этих группировок является окрестность
солнечно-земных точек либрации. Как нам представляется, использование паруса с
управляемыми отражательными характеристиками является хорошей альтернативой использованию
микродвигателей. Предварительные оценки показывают, что задача управления движением
группировки в окрестности L1,
L2 может быть решена с
применением достаточно скромных по размерам солнечных парусов, сопоставимых по
размерам с солнечными батареями. Однако задача применения такого способа
управления является абсолютно новой, поэтому границы возможностей
использования такого способа управления
остаются неясными, как и требования по собственно алгоритмам управления.
Планируется продолжить работы по разработке методов управления
аппаратами с большим парусом, в частности, в дополнение к задачам маневров по
изменению амплитуд орбит изучить возможности изменения среднего расстояния
орбиты от Земли за счет применения паруса.
Основное внимание планируется направить на решение вопросов
применимости парусов малых размеров для проектов, использующих группировки в
окрестности точек либрации. Примером таких проектов может служить
астрофизический проект XEUS,
предполагающий размещение зеркала и рентгеновских детекторов на разных
аппаратах, так что ось такого комплексного прибора наводится на источник
излучения путем соответствующего изменения относительного положения в
пространстве этих аппаратов. Другой пример - солнечный коронограф, использующий
отдельно движущиеся солнечный экран и собственно датчиковую часть разнесенного в пространстве прибора.
Перечисленные
результаты работы были представлены в виде опубликованных докладов на
международных и внутрироссийских конференциях и
семинарах (в Москве на Королевских чтениях и на интернет-семинаре
по механике и управлению в ИКИ РАН, представлен и принят доклад на конференцию
по операциям в космосе SpaceOps 2006, которая проводилась в Риме в июне 2006 года).
Р.Р.Назиров, Д.И.Новиков, Н.А.Эйсмонт.
Движение космических аппаратов с жидкокристаллическим парусом в окрестности
солнечно-земных точек Лагранжа L1 и L2.
Доклад на ХХХ Академических чтениях по космонавтике. Москва, 25-27 января 2006
года. ( В печати в составе избранных докладов).
В.М.Готлиб, В.М Линкин,
А.Н. Липатов, А.А. Суханов, Н.А.Эйсмонт. Баллистические расчеты для полета малого
космического аппарата к Марсу на электрореактивной тяге. Доклад на выездном
семинаре по космическому приборостроению. Таруса, 7-9 июня 2006 года. ( В
печати).
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
3. Разработка методов
управления ориентацией малых космических аппаратов с минимальным составом измерительных
и исполнительных элементов. Анализ возможностей построения систем управления
ориентацией с использованием солнечного паруса в сочетании с магнитными
катушками.
Разработаны программы расчета движения спутников Земли около центра
масс под воздействием гравитационного
поля Земли и управления, использующего только измерения датчиков составляющих
угловой скорости. Были разработаны алгоритмы вычисления управляющих моментов
для полетов с применением двигателей малой тяги, когда требуется удовлетворять
ограничениям по направлению вектора тяги и одновременно следить солнечными
батареями за Солнцем. Были также исследованы пределы применимости простейших
систем ориентации, следящих одной осью спутника за центром Земли. Было
показано, что применение одних только датчиков угловой скорости позволяет
выполнять эту задачу. Подготовлены материалы к изданию препринта.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
4. Подготовка экспериментов на
МКС для оценки возможностей использования сети наземных
станций мобильной связи для задач управления околоземными космическими
аппаратами и получения телеметрической информации.
Проведен анализ
возможностей и ограничений на применение телеметрических систем использующих
сеть наземных станций для сброса телеметрической информации и выдачи команд на
борт. Показана реализуемость такой системы на базе общедоступных сетей
мобильной связи и использования соответствующих уже
имеющихся технологий.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
5. Исследование
задач навигационной и баллистической части проекта СРГ для оценки возможности
реализации сценариев наблюдений.
Подготовлены расчетные
материалы по возможным сценариям запуска аппарата на орбиту. Проведен анализ
планируемых вариантов при запуске с космодрома в Куру и с космодрома Байконур.
в.н.с., к.т.н. Эйсмонт Н.А., Тел. 333-10-78, E-mail: neismont@iki.rssi.ru
6. Разработка алгоритмов
управления сложными системами в условиях неопределенности. Оценка вероятности
пребывания возмущенной системы в
допустимой области и разработка алгоритмов управления и стабилизации возмущенных
систем на основе вероятностного критерия.
Время пребывания в заданной области фазового пространства служит одним
из основных параметров, определяющим надежность или «жизнеспособность»
физических и технических систем. Теория больших уклонений сводит асимптотическое
вычисление этого параметра для слабо возмущенных диссипативных систем к решению
задачи минимизации детерминированного критерия, имеющего смысл функционала
действия. Построение функционала и решение соответствующего уравнения
Гамильтона-Якоби лежат в основе
асимптотического анализа. Ранее с помощью такого подхода были получены
оценки среднего времени пребывания точки в прямоугольной или круговой области
на плоскости и оценены предельные возможности линейного регулятора,
управляющего движением системы. В работах 2006 г. исследуется более общая задача об удержании системы с п степенями свободы в области
произвольной формы. Движение системы описывается уравнениями Лагранжа с учетом
полной диссипации и возмущающих случайных сил.
Показано, что асимптотическая оценка среднего времени
пребывания в области может быть представлена как сумма двух слагаемых,
зависящих от кинетической и потенциальной энергии, соответственно. Первое
слагаемое найдено в явном виде; второе слагаемое удовлетворяет линейному
уравнению в частных производных первого порядка. Выделен класс потенциальных
функций, для которых решение также может быть найдено в явном виде.
Исследован выход на различные участки границы области;
в частности, изучена задача о выходе из области, граница которой определяется
только обобщенными координатами и не зависит от обобщенных скоростей. Найдена
точка выхода на границу и показано, что система достигает границы области с
нулевой скоростью.
Как пример, рассматривается задача об оценке времени
достижения потенциального барьера системой с двумя степенями свободы и
потенциалом типа Хенона-Хейлеса.
A.
Kovaleva. Upper and lower bounds of
stochastic resonance and noise-induced synchronization in a bistable
oscillator. Physical Review E, July, 2006, vol. 74, pp. 011126-1 -011126-5.
A.
Kovaleva. Solution of the exit time
problem for mechanical systems with fast noise. Probabilistic
Engineering Mechanics, 2006, Vol. 21, No 4 pp 300-304.
A.
Kovaleva. A reliability-based
criterion of structural performance for structures with linear damping. Smart Structures and Systems, 2006, Vol. 2, No. 4.
А. С. Ковалева, Л.Д. Акуленко. Оценка времени удержания слабо возмущенной лагранжевой
системы в заданной области. Доклады Академии Наук, 2006, т. 411, № 1.
в.н.с., д.ф.-м.н. А. С. Ковалева, a.kovaleva@ru.net
7. Изучение влияния несферичности геоида и гравитационных возмущений со стороны
внешних тел на эволюцию орбит и время существования ИСЗ нового поколения.
Исследования для выявления границ областей преимущественного влияния
возмущений, обусловленных различными факторами (сжатием Земли и влиянием
внешних тел).
Продолжено изучение эволюции орбитальных элементов под влиянием несферичности центрального тела и гравитационными
возмущениями со стороны внешних тел (Луна, Солнце) на основе
графо-аналитических и численных методов. Уточнена классификация орбит
спутников, позволяющая выделить область совместного влияния перечисленных
факторов и область преимущественного влияния несферичности
центрального тела. Сформулирована задача дальнейших комплексных исследований
влияния перечисленных факторов на время существования спутника и критериев его
соударения и несоударения с центральным телом
конечного радиуса.
По
результатам работы сделан доклад на 5-ой Всероссийской конференции по
фундаментальным и прикладным проблемам современной механики в г. Томске и
опубликована статья в журнале «Физика».
с.н.с. к.ф.-м.н. В. И. Прохоренко,
тел. 333-50-45, vprokhor@iki.rssi.ru
8. Исследование влияния
гравитационных возмущений от Луны и Солнца и прецессии плоскости орбиты Луны на
эволюцию орбит и время существования ИСЗ нового поколения.
Проведено геометрическое исследование влияния
прецессии плоскости орбиты Луны на
решение двукратно осредненного ограниченной проблемы трех тел с
использованием аналитических методов и численного интегрирования. В
результате было обнаружено существенное
влияние долготы восходящего узла орбиты ИСЗ связанного с дополнительным
возмущающим фактором, на время существования ИСЗ. Была сформулирована
постановка задачи параметрического анализа
времени существования ИСЗ до его соударения с центральным телом и
практических направлений увеличения этого времени для спутников нового
поколения с учетом всего комплекса возмущающих факторов.
По
результатам работы сделан доклад на 5-ой Всероссийской конференции по
фундаментальным и прикладным проблемам современной механики в г. Томске.
с.н.с. к.ф.-м.н. В. И. Прохоренко,
Тел. 333-50-45, vprokhor@iki.rssi.ru
9. Оптимизации перелетов с
малой тягой в задаче трех тел на основе модифицированного метода
транспортирующей траектории. Завершение
работ по созданию теории оптимальных
перелетов с ограничениями на направление тяги.
Завершено проведение теоретических исследований, направленных на
создание теории оптимальных перелетов при ограничениях на направление тяги. Эти
исследования проведены для ограничивающих множеств, заданных в виде равенств, в
виде неравенств, а также для смешанных ограничений. В случае нелинейных
ограничений исследованы свойства оптимального вектора тяги и предложена
математическая процедура нахождения этого вектора. Для линейных ограничений
оптимальный вектор тяги найден в явном виде. Проведен анализ практических
примеров ограничений на направление тяги, обусловленных особенностями
конструкции КА или его системы ориентации и стабилизации. Для нахождения
оптимальных траекторий перелета предложено использовать модифицированный метод
транспортирующей траектории (МТТ). Показано, что этот метод может
использоваться также для получения достаточного условия осуществимости
конкретного перелета с данными ограничениями на направление тяги. Создана
компьютерная программа нахождения оптимальных траекторий перелета для различных
видов ограничений на направление тяги и проведен детальный численный анализ
таких траекторий.
В
модифицированном МТТ требуемая точность оптимизации достигается путем разбиения
интервала времени перелета на подынтервалы и
применения МТТ к каждому из них в отдельности. Получены теоретические оценки
зависимости точности вычислений от числа подынтервалов:
ошибка вычислений обратно пропорциональна этому числу по скорости и квадрату
этого числа по положению. Эти оценки полностью совпали с результатами
численного анализа. Однако, как показал и теоретичекий,
и численный анализ, ограничения на направление тяги приводят к плохой
обусловленности некоего матричного интеграла на коротких подынтервалах,
что в свою очередь ведет к резкому скачку ошибки вычислений при большом числе подынтервалов. Таким образом, в ряде случаев
получение высокой точности при ограничениях на направление тяги требует
проведения дополнительных исследований.
C. R. H. Solórzano,
A. A. Sukhanov, A. F. B. A. Prado. Analysis of Trajectories to
А. А. Суханов, А. Ф. Б. де А. Прадо. Оптимизация перелетов при
ограничениях на направление тяги – I, Космические исследования (в печати).
А. А. Суханов, А. Ф. Б. де А. Прадо. Оптимизация перелетов при
ограничениях на направление тяги – II, Космические исследования (в печати).
А. А. Суханов, А. Ф. Б. де А. Прадо. Оптимизация перелетов с
малой тягой в задаче трех тел, Космические исследования (в печати).
с.н.с., к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
10. Проведение исследований по
проекту создания сети малых метеостанций на Марсе.
В рамках этого российско-финского проекта
(название проекта MetNet, научный руководитель с российской стороны В. М. Линкин)
в 2005 г. был проведен анализ траекторий полета к Марсу с запуском в 2009 г.
Анализ проводился в предположении, что КА сначала выводится на близкую к
круговой орбиту спутника Земли, а последующий разгон, перелет к Марсу и перевод
КА на орбиту спутника Марса осуществляются электрореактивными двигателями малой тяги. Результаты анализа
приведены в выпущенном ИКИ в июле 2005 г. документе ENGINEERING NOTE. MetNet Project
“Development of Martian SMS network” (SMS означает Small MeteoStation).
В дальнейшем был рассмотрен также вариант
предварительного выведения КА на орбиту типа «Молния» и последующего разгона с
этой орбиты. В 2006 г. был проведен предварительный анализ разгона КА малой
тягой по эллиптической спирали с орбиты типа «Молния» на траекторию полета к
Марсу. Как показал этот анализ, выведение КА на орбиту «Молнии» позволяет
увеличить массу КА на участке перелета к Марсу на 8–14 кг (12–20%) по сравнению
с выведением на круговую орбиту спутника Земли. Основные результаты
предварительного анализа приведены на рис. 1.
Рис. 1. Результаты
анализа разгона малой тягой у Земли
для полета
к Марсу в рамках проекта MetNet.
Другие работы.
Была
продолжена и в основном завершена начатая в 2005 г. работа по разработке метода
оптимизации перелетов с малой тягой в задаче трех тел, описанной моделью
движения Хилла. Важность
этой работы обусловлена следующими двумя обстоятельствами:
1) В последние годы все
большее значение для космических полетов приобретают солнечно-земные
коллинеарные точки либрации L1 и L2, поскольку они очень удобны для размещения в их
окрестностях космических аппаратов с целью проведения фундаментальных и
прикладных исследований в области солнечно-земной физики. В ближайшие годы
можно ожидать также использования коллинеарных точек либрации системы
Земля-Луна, например, для размещения в окрестности точки L2 спутников связи с обратной стороной Луны. Между
тем полет к коллинеарным точкам либрации и движение в их окрестностях с
достаточной точностью описываются моделью Хилла.
2) Использование
электрореактивных двигателей малой тяги для космических перелетов, начатое
несколько лет назад, несомненно, будет расширяться, в том числе и для полетов к
точкам либрации.
Метод
оптимизации был разработан на основе модифицированного метода транспортирующей
траектории (МТТ). МТТ основан на линеаризации движения около некоторой опорной
орбиты (транспортирующей траектории) и создавался для задачи двух тел. В ходе
работы МТТ был адаптирован к произвольной модели внешних сил, а для нахождения
транспортирующей траектории использовался эффективный метод решения краевой
задачи в модели движения Хилла, описанный в статье A.A. Sukhanov and A.F.B. de A. Prado. Lambert Problem Solution in the Hill Model of Motion, Celestial Mechanics and Dynamical Astronomy,
2004, Vol. 90, pp. 331–354. Был также проведен теоретический анализ, в ходе которого
были получены теоретические обоснования предложенного метода оптимизации
перелетов в произвольном поле сил, а также исследованы некоторые важные
свойства оптимального вектора тяги. Предложенный метод оптимизации применим
также при ограничениях на направление тяги в соответствии с описанными выше
результатами работ по п. 5.1.12.
Создана компьютерная
программа оптимизации перелетов с малой тягой в модели движения Хилла с
использованием разработанного метода оптимизации. Программа предназначена для
оптимизации следующих типов перелетов:
– с низкой круговой орбиты
спутника Земли в заданную точку пространства или на гало-орбиту вокруг точки
либрации L1 или L2 (в этом случае предполагается, что старт с орбиты
ИСЗ в окрестность точки либрации осуществляется большой тягой и программа
определяет оптимальный вектор приращения скорости на орбите ИСЗ);
– между двумя заданными
точками в пространстве;
– из
заданной точки в пространстве на заданную гало-орбиту или с заданной гало-орбиты
в заданную точку;
– между двумя заданными
гало-орбитами вокруг одной и той же точки либрации или вокруг разных точек
либрации.
Предусмотрена
возможность следующих ограничений на направление тяги: тяга направлена вдоль
линии Солнце-Земля или по нормали к этой линии. Программа имеет удобные
средства ввода исходных данных, графическое отображение промежуточных и
окончательных результатов в реальном времени, а также меню для интерактивного
управления работой программы и вводом-выводом данных. Проведен обширный
численный анализ различных типов перелетов с малой тягой. Некоторые этапы
работы программы при оптимизации
перелета между двумя заданными гало-орбитами приведены на рис. 2–5.
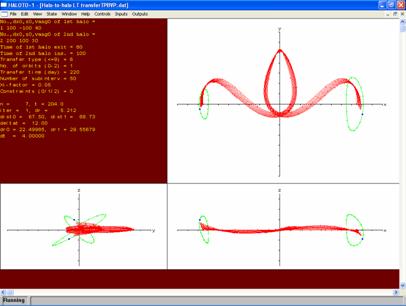
Рис. 2. Процесс решения краевой
задачи для нахождения транспортирующей траектории
(промежуточный вывод данных,
задаваемый с помощью меню).
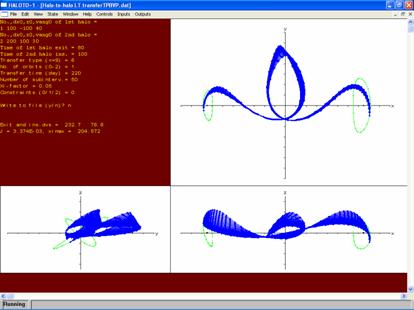
Рис. 3. Процесс работы метода
транспортирующей траектории.
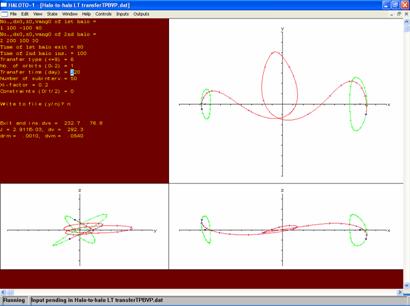
Рис. 4. Оптимальная траектория
перелета с малой тягой.
Рис. 5. Завершение работы программы:
величина и углы направления оптимального
вектора тяги как функции времени
полета.
Результаты работы
изложены в статье, принятой к печати журналом «Космические исследования», а
также докладывались на семинарах в ИКИ РАН, в ИПМ им. Келдыша РАН, на
конференции по фундаментальным и прикладным проблемам механики в Томске и на XIII Бразильском Коллоквиуме
по орбитальной динамике.
с.н.с., к.ф.-м.н. А. А. Суханов, sukhanov@iki.rssi.ru
11. Разработка эффективных
алгоритмов оценивания и управления
сложными динамическими системами.
Были разработаны алгоритмы получения
оптимальных оценок при неточном знании законов распределения ошибок измерения;
разработана теория управления вращением
осесимметричного тела и найдены аналитические решения для
произвольных граничных условий. Была найдена связь между задачами оптимального
оценивания в линейных динамических системах с запаздыванием при ненулевых
начальных условиях и задачей оценивания при произвольной корреляции между
ошибками измерения.
1. Бахшиян Б.Ц. Алгоритм для многопараметрических задач линейного программирования, возникающих
при решении оптимальных задач коррекции и планирования
эксперимента // Тезисы докладов международного научного семинара «Устойчивость,
управление и моделирование динамических систем», Россия, Екатеринбург, 15-17
ноября
2. Бахшиян Б.Ц., Федяев К.С. О решении почти вырожденных и
плохо обусловленных задач навигации методами линейного программирования //
Труды VI Международной конференции
«Идентификация систем и задачи управления» SICPRO’ 07, Москва, 29 января
– 1 февраля 2007г.
В работах [1,2] предложен и
реализован для ряда оптимальных задач
навигации новый алгоритм решения многопараметрических задач линейного
программирования. Этот алгоритм позволяет избежать вычислительных проблем,
которые возникают при появлении почти вырожденных решений (т.е. решений с
малыми значениями базисных переменных),
а также в случаях, когда базисная матрица плохо обусловлена. Решено несколько
модельных задач и задачи одноимпульсной коррекции, в которых возникают
указанные проблемы.
3. Сиротин А.Н. Аналитические решения в задаче
оптимального управления вращением осесимметричного
тела // ПММ. 2006. Том 70. Вып. 2. С. 225 – 235.
В работе [3] получено аналитическое решение задачи оптимального по энергозатратам вращения динамически симметричного КА для
произвольных граничных условий на основе новых первых интегралов и нового типа
преобразований вектора состояний. Показано,
что в общем случае решение не единственно. Построена функция Беллмана
для рассмотренной задачи, и как следствие, получено решение задачи в форме
закона управления с обратной связью.
4. Сиротин А.Н.
О проблеме формирования законов управления с обратной связью для класса линейных дискретных
систем с ограничениями // Тезисы докладов 11-й международной конференции
«Системный анализ, управление и навигация», Крым, Евпатория, 2-9 июля 2006
года. М.: Изд-во МАИ, 2006. С. 180 – 182.
5. Сиротин А.Н. О решении задачи синтеза ограниченного
управления для класса линейных систем с дискретным временем // Тезисы докладов
международного научного семинара «Устойчивость, управление и моделирование
динамических систем», Россия, Екатеринбург, 15-17 ноября
В работах [4,5] обсуждается
задача формирования управления в форме функции текущего времени и состояния для
линейных стационарных дискретных систем с ограничениями. Считается, что
размерности векторов управления и состояния совпадают, а сама система
0-управляема. Утверждается, что для систем указанного класса синтез управления
может быть получен в результате решения некоторой задачи локально-оптимального
управления. Более подробно это означает, что для каждой такой системы имеется
возможность построить функцию текущего состояния и управления таким образом,
что если выбирать допустимое ограниченное управление как минимизующее
значение функции в каждый момент, то получаемое управление является решением
задачи синтеза в проблеме 0-управляемости.
6. А.И.
Матасов. Решение задачи оптимального оценивания в линейных динамических
системах с запаздыванием при ненулевых начальных условиях. Аннотации докладов
IX Всероссийского съезда по теоретической и прикладной механике. Нижний
Новгород, 22-28 августа2006 г., Т.1, С.85.
7. А.И. Матасов. Проблема фильтрации в системах с
запаздыванием и ее связь с задачей оценивания при произвольно коррелированном
шуме в объекте. Доклады РАН, 2007, №2 (принята к
публикации).
Опишем результаты работ [6,7] Во многих динамических процессах будущее
состояние процесса зависит не только от текущего состояния, но и от состояния
процесса в прошлом. Уравнения с запаздыванием описывают широкий класс
автоматических систем, Они возникают при моделировании механических процессов,
содержащих пневматические и гидравлические контуры, в некоторых моделях
движения тела в жидкой среде и т.д. В работе В.Б.Колмановского
и Т.Л.Майзенберг (1977г.) была решена задача
оптимальной фильтрации в линейных динамических системах с запаздыванием в
предположении, что начальное состояние системы почти всюду равно нулю. Однако
такое условие не всегда выполнено. В данной работе результат указанной работы
1977г. обобщен на случай ненулевых начальных условий. Отметим, что это
обобщение не следует непосредственно из работы
д.ф.-м.н.
Бахшиян Б.Ц. bbakhshiyan@gmail.com
12. Разработка методов,
обеспечивающих автономную посадку на неподвижную поверхность средств
динамического определения.
Создана программа, позволяющая обеспечить автономную посадку на
неподвижную поверхность.
М.И. Войсковский разработал эффективный алгоритм обнаружения стыковочного
знака на объекте по зашумленным изображениям, полученным с видеокамеры. На языке СИ++
написана программа, выявляющая стыковочный знак на модельных изображениях.
Этот алгоритм может быть использован для сближения спасательного аппарата с
подводной лодкой, лежащей на грунте.
д.ф.-м.н.
Бахшиян Б.Ц. bbakhshiyan@gmail.com
13.
Исследование методов управления движением быстро вращающейся тросовой системы
при условии, что трос между концевыми блоками является тяжелым и растяжимым.
Разработаны алгоритмы управления движением
тросовой системы с тяжелым и растяжимым тросом, находящемся во вращательном
состоянии.
Созданы алгоритмы управления режимом раскрутки тросовой системы,
используя эффект параметрического возбуждения колебаний троса.
Предложен алгоритм управления параметрами продольного колебания
тяжелого троса для случая выполнения контакта концевого блока тросовой системы
с обменным грузом.
Разработан алгоритм управления параметрами продольного колебания
тяжелого троса для случая отцепления обменного груза от концевого блока тросовой
системы.
Методами численных расчётов показано, что рассмотренные задачи не имеют
принципиального отличия от аналогичных задач с невесомым и растяжимым тросом.
Исследование поперечных колебаний тяжелого растяжимого троса
показывает, что амплитуда их колебаний сравнительно мала. Для управления
поперечными колебаниями троса предложено использовать ракетные двигатели малой
тяги, находящиеся на концевых блоках системы. Разработан алгоритм
последовательного включения двигателей, обеспечивающий управление поперечными
колебаниями тросовой системы.
И.М.Сидоров, Н.Н.Иванов, Е.В.Емельянова,
«О принципиальной возможности использования
тросовых систем для решения транспортных задач в космосе». «Космические исследования», в
печати.
д.т.н. Сидоров И.М., тел.333-14-89
14.
Разработка методов определения траектории перелета обменных
грузов между концевыми блоками вращающихся тросовых систем, которые
движутся по разным орбитам
Решение задачи о
построении группировки космических
объектов, которые в совокупности представляют собой постоянно действующую
транспортную трассу в космическом пространстве, может быть следующим.
В группировку предполагается включить
орбитальные тросовые системы и обменные грузы, которые могут осуществлять
перелет от одной тросовой системы к другой. Таким образом, задача выполнения
космических полетов решается поэтапно: сначала строится транспортная трасса в
космическом пространстве от одного пункта до другого, например, от Земли до
Луны, а потом по этой трассе многократно перевозятся грузы в обоих
направлениях.
Решается задача по
выбору опорной траектории, по которой осуществляется перелет обменного груза от
одной околоземной орбиты к другой.
Эта система может
быть также использована для доставки грузов с Земли до поверхности Луны. Предлагается
организация двухстороннего равновесного обмена грузами. На Луну доставляется
полезный груз, например для строительства лунной базы, а в обратном направлении
транспортируется балласт (лунный грунт).
Предварительное
моделирование показывает, что возможно
использование двух околоземных орбит: первая орбита – близко к
круговой, для вывода груза с поверхности Земли; вторая орбита – с большой
величиной апогея для вывода груза на высокую эллиптическую орбиту.
И.М.Сидоров,
В.А.Фролов, «О возможности использования тросовых систем для построения
постоянно действующей транспортной трассы Земля – Луна», IAC 2006, Москва, 27 – 29 авг. 2006, тезисы доклада.
д.т.н. Сидоров И.М., тел.333-14-89
Системы технического зрения в решении задач навигации и терминального
управления
Получены
следующие результаты:
1. Построена оценка Крамера-Рао методической погрешности трехмерной
реконструкции поверхности, визируемой монокулярной системой технического
зрения, при наличии эпиполя на визируемой поверхности.
Оценка построена для случая одновременной реконструкции поверхности и определения
линейных и угловых координат аппарата. Разработана соответствующая программа
для ПЭВМ.
2. Построена оценка Крамера-Рао методической погрешности трехмерной
реконструкции поверхности, визируемой бинокулярной системой технического
зрения. Оценка построена для случая одновременной реконструкции поверхности и
определения линейных и угловых координат аппарата. Разработана соответствующая
программа для ПЭВМ.
3. Разработан эффективный
численный метод решения системы нелинейных уравнений относительно параметров
движения и профиля визируемой поверхности. Получены оценки вычислительной
сложности алгоритма. Экономия вычислительных затрат осуществляется за счет
следующих факторов:
·
Разделения задач оценивания профиля визируемой
поверхности и оценивания параметров движения, что возможно в стереорежиме (а также при числе телевизионных камер,
большем 2). При этом размерность пространства поиска параметров движения
(оптимизации целевой функции) снижается до 6.
·
Использования свойств структуры
множества решений, позволяющих реализовать комбинированный
численно-аналитический метод оптимизации. Это в свою очередь позволило снизить
размерность пространства поиска параметров движения (оптимизации целевой
функции) до 3.
·
В качестве метода оптимизации использован
классический квазиньютоновский метод оптимизации Левенберга-Маркардта, который в данном случае, как правило,
сходится за 2-5 итерации.
4. Проведена экспериментальная
проверка различных методов селекции аномальных измерений (грубых ошибок
установления соответствия точек поверхности на их изображениях). Проверены
следующие методы селекции аномальных измерений:
·
по невязкам целевой функции;
·
по локальной структуре реконструированных
профилей визируемой поверхности (гладкость, величина вариации);
·
контролю "обратным поиском".
5. Разработана модельная программа поиска соответствия точек поверхности в сереопарах в яркостном представлении с пиксельной точностью. Для повышения точности поиска использовался уточняющий субпиксельный поиск в яркостном и частотном представлениях.
Руководитель
работы с.н.с., к.т.н. В. А. Гришин. Тел. 333-11-88. E-mail: vgrishin@iki.rssi.ru
Подготовлена и сдана в
редакцию статья:
Гришин В. А. “Оценка Крамера-Рао
методической погрешности 3D реконструкции при наличии эпиполя
на визируемой поверхности”. Статья сдана в редакцию сборника научных трудов
“Искусственный интеллект в технических системах” Гос.ИФТП.
Подготовлена
и сдана в редакцию статья:
Гришин В. А. “Оценка Крамера-Рао
точности измерения параметров движения и реконструкции профиля поверхности,
наблюдаемой бинокулярной системой технического зрения” Статья сдана в редакцию
журнала “Pattern Recognition and Image Analysis:
Advances in Mathematical Theory and Applications”.
Гришин В.А., Книжный И.М., Хрекин
К.Е. “Алгоритмы установления соответствия при обработке изображений для решения
задач управления посадкой летательных аппаратов” Тезисы докладов Четвёртой
всероссийской открытой конференции «Современные проблемы дистанционного зондирования
Земли из космоса» Москва, ИКИ РАН, 13-17 ноября 2006.